TP :MOUVEMENT D'UNE BALLE DANS LE CHAMP DE PESANTEUR
I/Objectifs :
* Etudier les paramètres du mouvement du centre d'inertie d'une balle lancée dans le champ de pesanteur avec une vitesse initiale.
* s'intéresser à la nature des "mouvements projetés" de la balle .
II/Acquisition :
A partir du dossier "REGRESSI" lancer "REGAVI" .
Lecture d'un fichier Avi
Ouverture d'un fichier image ![]() / chutpar.avi
/ chutpar.avi
Agrandir la fenêtre au maximum ![]() . Si l'image n'occupe pas tout l'écran ,
procéder à un rafraichissement (click
. Si l'image n'occupe pas tout l'écran ,
procéder à un rafraichissement (click ![]() ).
).
Cliquer plusieurs fois sur ![]() et observer la chute de la boule , puis
revenir à la première image
et observer la chute de la boule , puis
revenir à la première image ![]()
Mesures :
* ![]() Echelle
Echelle
* Amener le curseur sur le trait supérieur de la règle (il n'est pas très visible !) /click /Amener le curesur sur le trait inférieur de la règle /click / Longueur en mètre : 1 /ok.
* Faire défiler quelques
images ![]() de façon à voir nettement la balle .
de façon à voir nettement la balle .
* Origine ![]() /Amener
le curseur sur la balle et cliquer
/Amener
le curseur sur la balle et cliquer
* ![]() Début
des mesures
Début
des mesures
* Amener le curseur sur la balle (soyez précis) et cliquer . Répéter l'opération jusqu'à ce que la balle soit pratiquement au sol .
* ![]() pour terminer les mesures/
pour terminer les mesures/![]() pour transmettre les mesures à Regressi
pour transmettre les mesures à Regressi
* S'assurer que la case
"Nouveau fichier" est cochée : ![]()
Ok
III/Equation de la trajectoire :
*Activer le fenêtre "GRAPHE " ![]() si elle ne l'est pas
si elle ne l'est pas
*click ![]() ("Coordonnées")/décocher la case
"Axes Orthonormés
("Coordonnées")/décocher la case
"Axes Orthonormés
*cocher l'option "ligne" si elle ne l'est pas 
*Ok
*Début Modélisation ![]() /Modèle
prédéfini
/Modèle
prédéfini ![]() /Parabole
/Parabole  /Ok
/Ok
*Ajuster
Q1)Ecrire sur votre copie l'expression de l'équation de la trajectoire et donnez les valeurs des coefficients a,b et c calculés par Regressi .
*Curseur standart/Réticule
Q2)Quelle est l'altitude maximale YF atteinte par le balle ou flèche ?Quelle est la valeur numérique de l'abscisse XF correspondante ?
Q3)Quelle est l'abscisse XD du point D de la courbe (autre que l'origine) pour lequel YD = 0 ?
Cette distance est appelée "portée"
IV/Etude des "mouvements projetés" du centre d'inertie de la balle :
a)notion de mouvement projeté :
 Etant
donné un point M de la trajectoire de coordonnées XM et YM ,
soit MX un point de l'axe Ox tel que
Etant
donné un point M de la trajectoire de coordonnées XM et YM ,
soit MX un point de l'axe Ox tel que ![]() = XM , et MY un point de l'axe OY tel que
= XM , et MY un point de l'axe OY tel que ![]() , les mouvements de MX et MY sont les mouvements
projetés de M .
, les mouvements de MX et MY sont les mouvements
projetés de M .
b)Equation horaire de MX ou x(t) :
*Fermer la fenêtre de modélisation (cliquer sur l'icône correspondante)
*click ![]() ("Coordonnées")
("Coordonnées")
*changer les paramètres de façon à visualiser x(t) /Ok
*Modéliser en choisissant le modèle linéaire (droite): /Remplacer
modèle/ Ajuster
/Remplacer
modèle/ Ajuster
Q4)Ecrire sur votre copie l'expression de l'équation de l'équation horaire x(t) et donnez les valeurs des coefficients a et b calculés par Regressi
c)Equation horaire de MY ou y(t)
Procéder comme précedemment (y(t) - modélisation) , mais en choisissant le modèle parabolique :
Q5)Ecrire sur votre copie l'expression de l'équation de l'équation horaire y(t) et donnez les valeurs des coefficients a , b et c calculés par Regressi .
d)Vitesse de MY ou vY(t)
*Activer la fenêtre "Grandeurs" ![]()
 *
*![]() Créer
grandeur
Créer
grandeur
* Compléter la fenêtre comme indiqué ci-contre (Dérivée , vy , m/s, dy/dt)
* Activer la fenêtre graphe
*Activer la fenêtre graphique
*Visualiser vy(t) [voir précédemment]
*Modéliser
Q6)Ecrire sur votre copie l'expression de l'équation de l'équation vy(t) et donnez les valeurs des coefficients a et b calculés par Regressi .
e) vx (t)
On pourra créer vx et visualiser vx(t) et vérifier qu'aux erreurs de pointage près vx(t) est pratiquement constante .
f)Conclusion :
* MX a un mouvement uniforme car sa vitesse est constante ou x(t) est une fonction affine du temps
* MY a un mouvement uniformément varié car sa vitesse est une fonction affine du temps
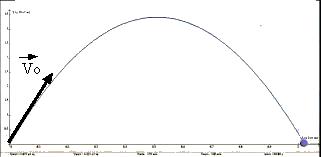
V/Bien viser !
Ouvrir le dossier Logiciel et lancer le logiciel "MOVE" .
Q7)Lancez le boulet pour qu'il atteigne la cible . Notez les valeurs de a et V0 .
VI/Etude théorique :
Q8)Donner une définition de la chute libre
1/Mise en équation :
|
Le repère Oxy est un repère terrestre . Une masse ponctuelle
m est lancée du point O à t=0 avec une vitesse initiale ![]() . On néglige les frottement de l'air .
. On néglige les frottement de l'air .
Le vecteur vitesse ![]() est dans le plan Oxy
et fait un angle a avec l'axe Ox .
est dans le plan Oxy
et fait un angle a avec l'axe Ox .
La durée de chute de la masse m étant relativement courte , le repère terrestre utilisé peut être considéré comme étant galiléen . Il est donc possible d'appliquer le théorème du centre d'inertie (ou deuxième loi de Newton) à la masse m dans ce repère .
Q9)Représentez sur un schéma (sans faire de calculs) l'allure de la trajectoire de la masse m.
Q10)Soit M un point de la trajectoire . Effectuer le bilan des forces appliquées à la masse m en M lorsque celle-ci est en chute libre. Représenter ces forces .
Q11)Ecrire le théorème du centre d'inertie ou deuxième loi de Newton. En déduire les composantes du vecteur accélération de la masse m à un instant quelconque.
Par intégrations successives , nous allons en déduire , les composantes du vecteur vitesse à un instant t quelconque et l'équation de la trajectoire .
Comme ![]() et que
et que  , nous pouvons écrire
les composantes de
, nous pouvons écrire
les composantes de  , ce qui s'écrit
aussi :
, ce qui s'écrit
aussi : ![]()
Ce sont les équations différentielles du mouvement de M (g est la norme du vecteur de champ de pesanteur )
* ![]() : la composante du
vecteur accélération suivant Oz est nulle .
: la composante du
vecteur accélération suivant Oz est nulle .
Reprenant cette égalité , une première intégration (primitive)conduit à ![]() (C1 est une constante).
(C1 est une constante).
Or à t=0 , la composante de ![]() suivant Oz , est V0,z =0 , puisque le vecteur vitesse
suivant Oz , est V0,z =0 , puisque le vecteur vitesse ![]() est dans le plan Oxy
. Comme vz est constante
quelle que soit l'instant t, cette constante ne peut qu'être égale à la valeur
de vz à t=0 , autrement dit C1=0 :
est dans le plan Oxy
. Comme vz est constante
quelle que soit l'instant t, cette constante ne peut qu'être égale à la valeur
de vz à t=0 , autrement dit C1=0 : ![]() quel que soit t .
quel que soit t .
Une nouvelle intégration conduit à : z= C2 quel que soit l'instant considéré.Un raisonnement analogue au précédent permet de conclure que C2=0 puisque z=0 à t=0 (particule en O à t=0)
Finalement z=0 quel que soit t : quelque soit l'instant considéré , la particule est donc dans le plan Oxy .
* ![]()
Une première intégration de ces deux équations conduit à :
![]() et
et ![]() quel que soit t
quel que soit t
A t=0 vx(0)=v0,x = v0 cos a et vy(0) = v0,y = v0 sin a
Cela signifie que lorsque nous remplaçons t par 0 , dans les deux expressions établies à la question précédente , nous devons obtenir respectivement v0,x et v0,y . Cela n'est possible que si :
C3= v0 cos a et C4 = v0 sin a
Finalement :
vx = v0 cos a et vy = -gt + v0 sin a quel que soit t
* En poursuivant l'intégration , nous obtenons , quel que soit l'instant t considéré :
x = (v0 cos a) * t + C5
y = - 1/2 g t2 + (V0 sin a)*t + C6 .
Comme à t = 0 , M est en O , c.à.d . x(0) = 0 et y(0) = 0 , nécessairement , les constantes C5 et C6 sont nulles .
D'où :x = (v0 cos a) * t et y = - 1/2 g t2 + (V0 sin a)*t
*En éliminant t , nous pouvons à présent en déduire l'équation de la trajectoire .De la première égalité , nous déduisons t= x/(v0 cos a) , et en reportant dans la seconde , nous obtenons :
![]()
C'est l'équation de la trajectoire (parabole)
VII/Exercices :
Pages 198 et suiv:16, 19, 29 et 30
TP Particule dans le champ de pesanteur - Correction :
1)y(x) = c x2 + bx + c
c= -2,5 m-1 ; b = 1,7 et c=0,005 m
C'est l'équation d'une parabole . Aux erreurs de pointage près , la valeur de a est pratiquement nulle .
2) xF= 35 cm ; yF = 29,6 cm .
xF se calcule en écrivant que y(x) est extrêmale en F et par conséquent dy/dx= 0 . On reporte ensuite xF dans l'équation y(x) pour en déduire yF .
Remarque : Nous avons aussi en F dy/dx = vy =0 : composante verticale du vecteur vitesse nulle .
3) xD = 69,4cm ; yD= 0
On calcule xD en résolvant l'équation y(x)=0 . Une solution correspond à xD .
4) x(t) = at + b
a= 1,44 m.s-1
b= 0,007 m : valeur pratiquement nulle aux erreurs de pointage près .
5)y(t) = ct2 +bt+a
c= -5,04 m.s-2 ; b= 2,4 m/s et a= 0,008 m (valeur pratiquement nulle aux erreurs de pointage près) .
Cette équation ne doit absolument pas être confondue avec y(x) [trajectoire] . y(t) est l'équation horaire du mouvement projeté de M sur l'axe Oy .
6)vy(t) = at+b
a = -9,9 m.s-2 b= 2,4 m.s-1 .
Cette expression de la vitesse est caractéristique d'un mouvement uniformément varié (mouvement projeté de M sur Oy) .
7)La simulation permet de constater que pour une cible donnée , il existe plusieurs couples (v0,a) qui permettent d'atteindre la cible .
Exemples :v0=80 m/s et a= 30 ° ou v0= 85 m/s et a= 60°
8)Un corps est en chute libre s'il n'est soumis qu'à une seule force : son poids .
9)La trajectoire du centre d'inertie de la masse m est une parabole :
10)
11)
![]() (
(![]() : deuxième loi de Newton .
: deuxième loi de Newton . ![]() : accélération du
centre d'inertie) .
: accélération du
centre d'inertie) .
Comme de plus ![]() , nous en déduisons
, nous en déduisons ![]() .
.
Correction des exercices : Tp pesanteur
Exercice 16 page 198
a et b.
On distingue 3 zones :
Dans la partie (1) entre 0s et 5 s, v est une fonction linéaire de t. Dans la partie (2) entre 5 s et 10 s, v est une fonction croissante du temps et dans la partie (3) entre 10 s et 13 s, v est une fonction constante (mouvement uniforme)
c)Dans la partie (1), l’accélération est a=dv/dt =coefficient directeur de la droite = 10/5 = 2 m/s2
Le mouvement est rectiligne uniformément accéléré.
d)Dans la partie (3), la vitesse étant constante , l'accélération est donc nulle.
e)À l’instant de date t = 7 s, on calcule l’accélération moyenne entre les dates 6 et 8 s soit :
a7 = (v(t8)-v(t6))/(t8-t6) = (11,6-10,5)/2 =0,55 m.s-2
Exercice 19 page 198 :
*À partir de t = 1 s, la valeur de la vitesse est constante (courbe 2). La chute étant verticale , la trajectoire est une droite .Le mouvement est donc rectiligne et uniforme : l'affirmation est donc exacte .
*Après t = 1,5 s, l’ordonnée z continue à augmenter : la bille continue donc à descendre, elle n’a donc pas encore atteint le fond de l’éprouvette : l'affirmation est fausse.
*De t = 0 à t = 0,75 s, le mouvement ne peut pas être décéléré puisque la valeur absolue de la vitesse |vz| augmente : affirmation fausse.
Exercice 29 page 201 :
a)La balle est en chute libre puisqu'elle n'est soumise qu'à
son poids . Par conséquent , en appliquant la seconde loi de Newton :![]() d'où :
d'où :
![]() et donc : ax=0
m/s2 et az= -g
et donc : ax=0
m/s2 et az= -g
b)Équation de la trajectoire : à partir des coordonnées de l’accélération, par intégration, on obtient successivement les coordonnées du vecteur vitesse de la balle et les coordonnées du vecteur position :
vx = v0 vz = -g × t
x = v0 × t z = - ½ g × t² + H
En éliminant t entre x(t) et z(t), on obtient : ![]()
c)Pour que la balle passe au-dessus du filet, il faut que lorsque x = xfilet=12 m on ait zfilet > h .
Or  . La balle rentre
donc dans le filet .
. La balle rentre
donc dans le filet .
Exercice 30 page 201 :
a)Coordonnées du vecteur vitesse à t0 = 0s sont v0x = v0cosα v0z = v0sinα
b)Le système étudié est la balle. Le référentiel choisi est le référentiel terrestre galiléen.
La balle est soumise à une seule force, son poids. En
appliquant la deuxième loi de Newton pour un solide de masse m constante on
obtient : ![]() , d'où dans le repère considéré : ax= 0 m/s2 , az= -g
, d'où dans le repère considéré : ax= 0 m/s2 , az= -g
c)Par intégration, on obtient les coordonnées du vecteur vitesse :
vx = C1 = v0cosα et vz = -gt + C2 avec ici C2 = v0sinα
d)En intégrant à nouveau , nous en déduisons on établit les coordonnées du vecteur position , en sachant qu'à t0= 0 s nous devons avoir x=0 m et z= 0 m : x = (v0cosα)t et z = -1/2 gt² + (v0 sinα)t
e)La vitesse en S n'est pas nulle. Quelle que soit la position de la balle, elle garde une même vitesse de déplacement horizontale vx = v0 cosα.
f)En S , la composante verticale de la vitesse est nulle vS,z= 0 m/s d'où -gtS+ v0 sina=0 et donc ts=(v0 sin a)/g . En reportant tS dans z(t) , nous obtenons :
zS = -1/2 g[(v0 sin a)/g]2 + (v0 sinα)*(v0 sin a)/g = (v02 sin2 a)/2g
g)La portée correspond à z=0 . Or en combinant les deux égalités établies dans d) nous obtenons :
z= - 1/2 g * x2/(v02*cos2 a) + tg a * x
Pour z= 0 , nous obtenons x*[-1/2g*x/(v02cos2 a)+(sin a / cos a)].
La solution x=0 ne convient pas (point de départ) . Nous obtenons donc finalement :
xI = (2 v02 cos2a *sin a /g cos a)= 2 v02 sin a cos a/g = (v02 sin 2a)/g
h)En remplaçant par les valeurs numériques proposées nous obtenons : zS = 4,1 m et xI = 29 m